
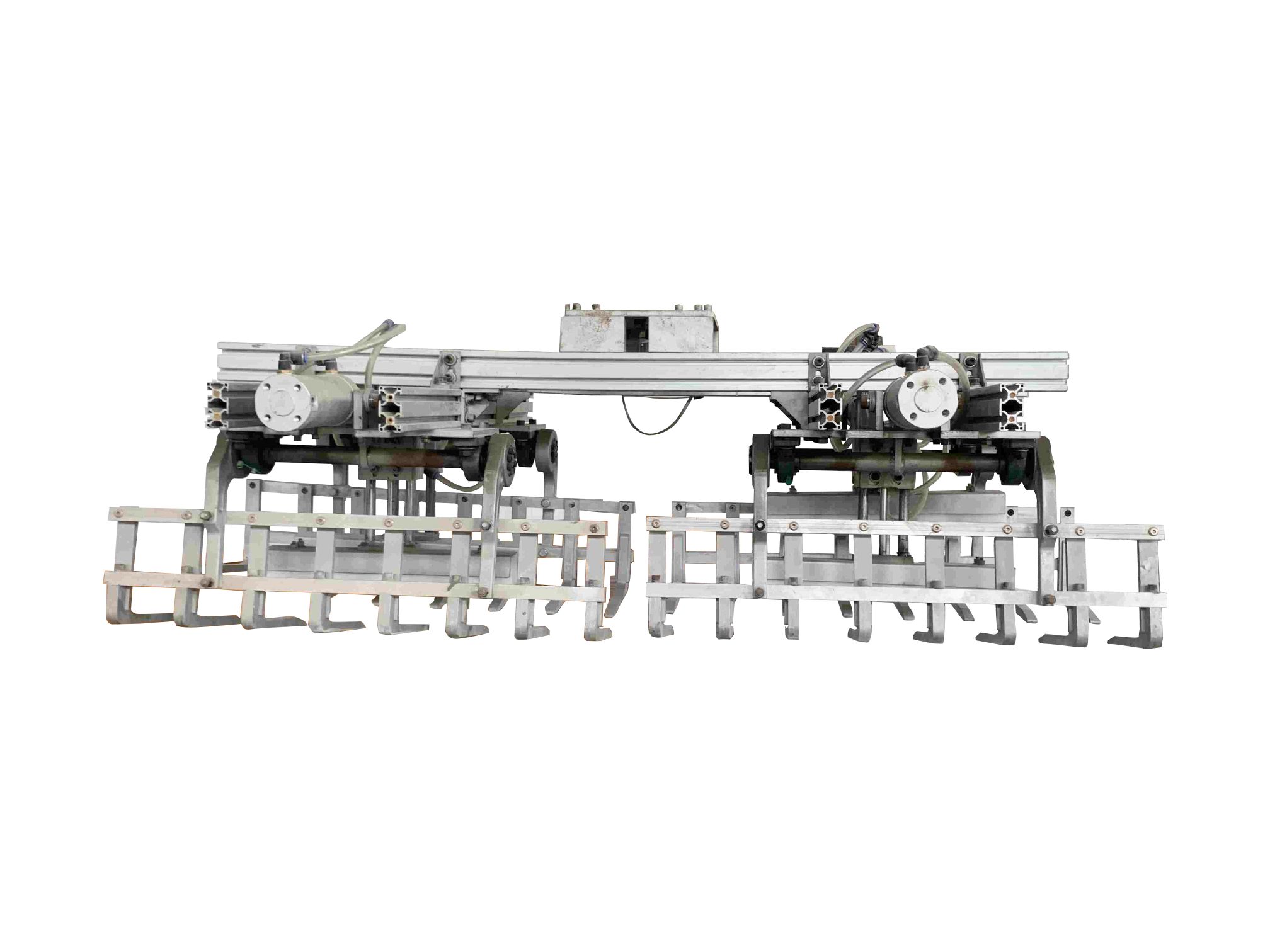




Palletizing robot double claw gripper
1. The double claw design enables the robot to grab two items at the same time or grab items from different positions, effectively reducing the number of grabs and thus shortening the palletizing time.
2. Usually equipped with a more powerful drive system and structural design, the two claws work together to disperse the load and can bear greater weight.
3. The two claws can move independently or in coordination, and can flexibly adjust the grabbing method according to the shape and size of the goods.
4. The double claws can be fine-tuned to achieve more accurate positioning and placement when placing goods on pallets or designated locations.
5. The double claws are symmetrically distributed or designed according to the principles of mechanics, which can better maintain balance when grabbing goods. The double claws can offset the unbalanced force of the goods by adjusting the strength and position.
It consists of two independent claws that can work together. The claws are usually made of high-strength aluminum alloy or stainless steel. They have the characteristics of light weight, high strength, and corrosion resistance, and can adapt to various harsh working environments.
 It is connected to the end of the palletizing robot's robotic arm through high-precision joints, bearings and transmission devices to ensure the stability and accuracy of the double claws during movement.
It is connected to the end of the palletizing robot's robotic arm through high-precision joints, bearings and transmission devices to ensure the stability and accuracy of the double claws during movement.
 The pressure sensor is used to monitor the gripping force of the claws in real time to prevent the goods from being damaged by excessive gripping force or falling due to insufficient gripping force; the position sensor can accurately feedback the position and posture of the claws.
The pressure sensor is used to monitor the gripping force of the claws in real time to prevent the goods from being damaged by excessive gripping force or falling due to insufficient gripping force; the position sensor can accurately feedback the position and posture of the claws.

Different grabbing modes can be flexibly switched according to the shape, size and weight of the goods, such as parallel grabbing, encircling grabbing and side clamp grabbing.
 The double claws can automatically adjust the gripping force and position according to the actual situation of the goods. When grabbing lighter goods, the claws will automatically reduce the gripping force to avoid damage to the goods.
The double claws can automatically adjust the gripping force and position according to the actual situation of the goods. When grabbing lighter goods, the claws will automatically reduce the gripping force to avoid damage to the goods.




